
Kebutuhan manusia akan bahan bakar fosil akan terus ada selama bahan bakar fosil tersebut masih dapat dicari dan diolah. Hingga saat ini, bahan bakar fosil masih menjadi sumber energi utama selain listrik, terutama bagi kendaraan bermotor yang beroperasi di darat, perairan, dan udara. Oleh sebab itu, bisnis migas merupakan salah satu usaha yang memiliki paling banyak keuntungan dan banyak perusahaan yang bergerak di bidang migas berlomba-lomba untuk mengeksplorasi, memiliki, dan mengeksploitasi sumur-sumur minyak bumi yang ada.
Minyak bumi merupakan campuran dari berbagai hidrokarbon yang bervariasi dari segi bentuk fisik (padat, cair, dan gas) dan komposisinya. Hidrokarbon yang terdapat pada minyak bumi sebagian besar (dari yang terbanyak jumlahnya) terdiri dari alkana, sikloalkana, dan hidrokarbon aromatik (rantai benzena).
Minyak Bumi merupakan kebutuhan yang sangat penting bagi banyak industri, dan sangat penting untuk menjaga peradaban manusia di jaman industrialisasi ini, sehingga minyak Bumi ini menjadi perhatian serius bagi banyak pemerintahan di banyak negara. Hal-hal yang termasuk di dalam industri minyak mentah adalah proses eksplorasi, ekstraksi, pengilangan, dan transportasi (yang biasanya diangkut dengan kapal tanker dan jalur pipa). Volume terbesar dari industri ini adalah bahan bakar minyak dan bensin. Minyak Bumi juga merupakan bahan bakar utama dalam pembuatan produk kimia lainnya, termasuk obat-obatan, pelarut, pupuk, pestisida, dan plastik. Industri ini biasanya terbagi menjadi 3 komponen besar, yaitu upstream, midstream, dan downstream.
Dalam usaha untuk eksplorasi dan eksploitasi sumur-sumur minyak bumi yang berada di laut, diperlukan banyak pengetahuan dari berbagai cabang keilmuan, terutama engineering. Beberapa keilmuan yang berperan di antaranya adalah teknik perminyakan, teknik mesin, teknik kelautan, teknik geodesi (bidang hidrografi), teknik geofisika, teknik geologi, dan teknik lingkungan. Karena tulisan ini akan memiliki pembahasan utama tentang survei hidrografis dalam industri migas, maka peran keilmuan lain akan memiliki porsi yang sedikit dalam pembahasannya atau tidak sama sekali.
Hidrografi adalah suatu keilmuan yang bertujuan untuk mendapatkan gambaran tentang apa yang berada di bawah suatu perairan. Hal tersebut dapat dilakukan dengan menggunakan teknologi yang disebut teknologi hidro akustik. Teknologi ini memiliki fungsi mirip dengan teknologi RADAR yang memanfaatkan gelombang elektromagnetik, sedangkan teknologi hidro akustik memanfaatkan gelombang suara atau dapat disebut juga teknologi SONAR. Teknologi SONAR bekerja sangat baik di dalam kolom air (dengan kecepatan sekitar 1500 m/s) karena gelombang suara dapat bekerja lebih baik pada medium yang rapat dibandingkan dengan gelombang elektromagnetik yang merambat lebih baik tanpa medium.
Teknologi SONAR terbagi menjadi dua sistem, yaitu sistem SONAR pasif dan sistem SONAR aktif. SONAR pasif, sesuai namanya hanya bekerja menerima gelombang suara. Sedangkan SONAR aktif bekerja dengan melaksanakan dua aktivitas, yaitu menghasilkan gelombang suara ke arah dasar perairan dan menerima kembali gelombang suara yang terpantul oleh dasar perairan.
SONAR pasif biasanya dipakai untuk keperluan militer untuk mendeteksi kapal selam dan digunakan kapal selam untuk mendeteksi kapal yang yang ada di permukaan atau juga untuk keperluan penelitian di laut. Receiver gelombang suara SONAR pasif bernama hydrophone. Hydrophone berfungsi sama dengan microphone yang menangkap gelombang suara di udara, hanya saja ia menangkap gelombang suara yang ada di air. Kegunaan SONAR pasif terbatas pada derau yang ditimbulkan oleh mesin kapal, oleh karena itu biasanya hydrophone dipasang atau diderek (towed) pada belakang kapal dan kapal selam untuk mengurangi efek derau yang dihasilkan mesin kapal.
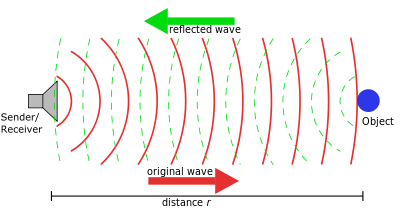
Gambar 1. SONAR aktif
SONAR aktif memiliki dua bagian penting, yaitu pemancar (transmitter) dan penerima (receiver) gelombang suara. Pemancar gelombang suara pada SONAR aktif bernama transducer. Transducer memiliki komponen yang bersifat piezo-electricity yang memiliki kemampuan untuk mengubah energi listrik menjadi gelombang suara dan sebaliknya. Sehingga tidak jarang transducer merangkap fungsinya sebagai penerima (receiver) gelombang suara. Apabila transducer tidak merangkap fungsinya sebagai receiver, fungsi receiver akan digantikan oleh hydrophone. SONAR aktif memiliki beberapa kegunaan, di antaranya adalah untuk mengukur kedalaman laut, mengetahui bentuk dan material dasar laut, serta membuat profil lapisan-lapisan yang berada di bawah dasar laut.
SONAR aktif yang digunakan untuk mengukur kedalaman laut bernama echo sounder. Terdapat dua jenis echo sounder, yaitu single beam echo sounder dan multi beam echo sounder.
Transducer pada single beam echo sounder memancarkan sebuah gelombang suara dalam rentang waktu tertentu yang tegak lurus ke arah dasar laut, kemudian gelombang suara menabrak dasar laut dan gelombang kembali kepada receiver. Untuk dapat menentukan kedalaman laut, tahap pertama yang echo sounder lakukan adalah mengukur waktu yang dibutuhkan bagi gelombang suara terpancar dari transducer hingga kembali ke receiver. Karena kecepatan suara pada medium telah diketahui sebelumnya, yang perlu dilakukan selanjutnya oleh alat adalah mengukur jarak tempuh gelombang suara pada kolom air, yaitu kecepatan suara dikalikan dengan waktu tempuh yang telah diukur. Kedalaman laut kemudian didapatkan dari setengah jarak tempuh gelombang suara pada kolom air karena gelombang suara merambat bolak-balik. Kedalaman laut yang telah diketahui tidak akan berarti tanpa informasi posisi, oleh karena itu perangkat GPS harus ikut dipasang pada paket alat echo sounder sejajar di atas transducer.
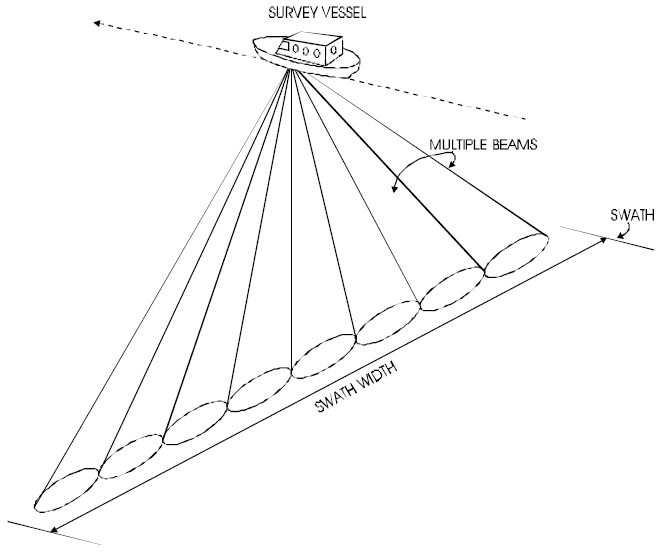
Gambar 2. Multi beam echo sounder
Cara kerja multi beam echo sounder hampir sama dengan tipe single beam. Perbedaannya adalah multi beam echo sounder dapat memancarkan beberapa gelombang suara ke beberapa arah yang segaris (sehingga terbentuk seperti kipas atau sapu), sedangkan singlet beam echo sounder hanya dapat mengukur kedalaman pada satu titik. Hal tersebut menyebabkan alat ini menghasilkan data kedalaman yang jauh lebih banyak dibanding pendahulunya, single beam echo sounder, yaitu seratus persen dari dasar laut yang disurvei dapat diketahui kedalamannya.
Untuk mengetahui bentuk dan material pembentuk dasar laut, sistem SONAR yang digunakan adalah side scan SONAR atau sering juga disebut tow fish karena bentuknya seperti ikan dan ditarik menggunakan alat penderek (tow). Sama seperti echo sounder, alat ini memancarkan gelombang suara juga, tetapi ke arah samping karena di sanalah letak transducer-nya, kemudian menerima kembali gelombang pantul dari dasar laut. Bentuk dan material pembentuk dasar laut dapat diketahui dari besarnya intensitas gelombang suara yang diterima karena setiap material pembentuk dasar laut menghasilkan karakteristik gelombang pantul yang berbeda-beda.
Selanjutnya, untuk membuat profil lapisan yang berada di bawah dasar laut, dilakukanlah suatu kegiatan yang disebut sub-bottom profiling. Pada kegiatan ini terdapat beberapa pilihan alat yang dapat digunakan tergantung pada kondisi tempat yang akan disurvei. Akan tetapi, sebagian besar alat yang digunakan menggunakan transducer yang menghasilkan gelombang suara dengan frekuensi rendah yang dapat menembus lapisan dasar laut, sedangkan sisanya menggunakan penembak udara atau air yang dikompres lalu mengandalkan hydrophone untuk menerima gelombang yang dihasilkan. Semua jenis alat sama dalam proses membuat profil lapisan di bawah dasar laut, yaitu pada lapisan yang berbeda jenisnya, gelombang suara yang diterima memiliki perbedaan waktu sampai kepada hydrophone atau transducer. Perbedaan pada alat-alat tersebut salah satunya adalah jangkauan kedalaman yang dapat ditembus.
Sebelum dapat mengeksploitasi sumur-sumur minyak bumi yang ada di bawah laut, harus terlebih dahulu diketahui di mana letak sumur-sumur tersebut dan kondisi sekitarnya, seperti kondisi topografi dan profil lapisan dasar lautnya. Peran survei hidrografi dalam hal ini sangat jelas terkait dengan apa yang telah dijelaskan sebelumnya mengenai teknologi hidro akustik.
Pertama, kedalaman laut harus diketahui agar alat-alat yang akan digunakan untuk pengeboran sumur dapat terpasang dengan baik dan aman. Seperti telah dijelaskan sebelumnya, kedalaman laut dapat diukur menggunakan echo sounder. Tahap selanjutnya adalah membuat profil lapisan di bawah dasar laut dengan sub-bottom profiling. Data yang didapat dari kegiatan ini nantinya akan digunakan untuk mengetahui apakah lapisan di bawah dasar laut yang akan dibor akan menghasilkan bahaya yang besar atau aman dari bahaya serta memiliki minyak ini di bawahnya atau tidak. Kedua hal tersebut (mengetahui jenis lapisan di bawah dasar laut) merupakan peran dari keilmuan geofisika dan geologi, sedangkan keilmuan hidrografi hanya sebatas menggambarkan profil yang ada di bawah lapisan dasar laut.
Dari pemaparan yang telah dilakukan, dapat disimpulkan bahwa peran survei hidrografi dalam industri migas sangatlah penting terutama pada fase sebelum pengeboran sumur dilakukan. Apabila survei hidrografi tidak dilakukan, kegiatan eksploitasi sumur minyak tidak akan dapat dilaksanakan. Meskipun dapat dilakukan, kegiatan pengeboran tersebut akan mengundang bahaya yang sangat besar.
Referensi:
de Jong, C., Lachapelle, G., Skone, S., & Elema, I. A. (2010). Hydrography. Delft: Delft University Press.
http://en.wikipedia.org/wiki/Sonar#Passive_sonar
http://id.wikipedia.org/wiki/Minyak_bumi
P.S., R. A. (2013). Aplikasi Survei Hidrografi dalam Pengelolaan Sumber Daya Alam Minyak dan Gas (offshore). Yogyakarta: Scribd.






{kind=link}
{kind=link}
{kind=link}